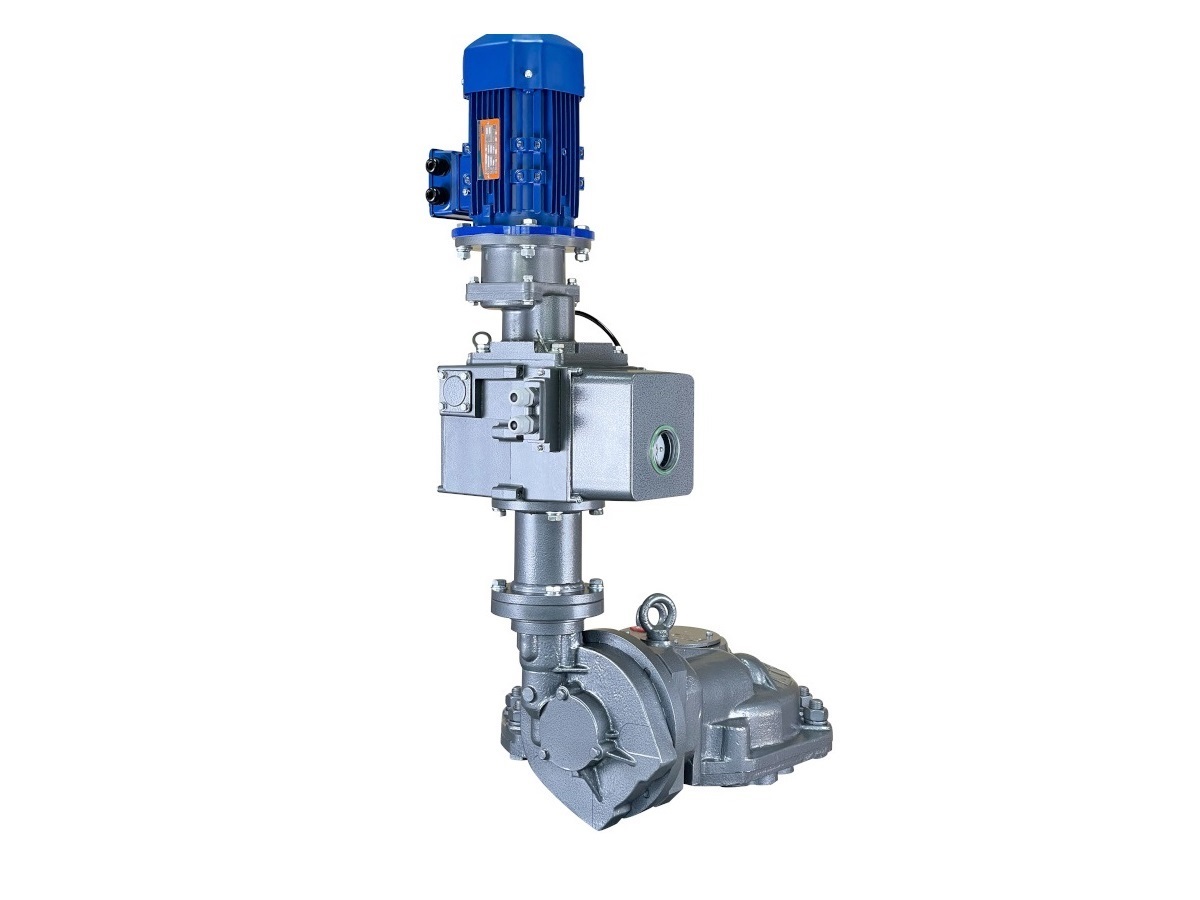

Многооборотные электроприводы с четвертьоборотным редуктором
|
Функции датчиков сигнализации положения и опции |
Датчик |
||||
| М | У | БЦА | ЕД | ||
| Дистанционное управление арматурой по командам управляющих устройств | + | + | + | + | |
| Ручное управление (ручным приводом) | + | + | + | + | |
| Управление приводом посредством дискретного управления 24 В | + | ||||
| Управление приводом посредством аналогового сигнала 4–20 мА | |||||
| Кнопки местного управления на приводе | + | ||||
| Сигнализация о положении выходного вала привода посредством токового сигнала 4–20 мА | + | + | + | ||
| Механический указатель положения | + | + | |||
| Цифровой указатель положения в процентах от полного хода | + | + | |||
| Индикация текстовых сообщений о состоянии привода | + | + | |||
| Настройка конечных положений «открыто», «закрыто» при помощи кнопок настройки на
плате датчика, методом «запоминания» положения |
+ | + | |||
| Автоматическая подстройка аналогового сигнала 4–20 мА | + | + | |||
| Выключение двигателя | при достижении заданных крайних положений | +2 | +2 | + | + |
| при достижении заданного максимального крутящего момента | +2 | +2 | + | + | |
| при отсутствии движения выходного вала | + | + | |||
| при перегреве двигателя | О2 | О2 | О | О | |